一. ROBOX AGV Tool:
RAT(ROBOX AGV tool):是一种运行在Windows/Linux平台的软件工具,用于设计AGV的车间地图,在地图中可以限定AGV的运行路径和运动状态。
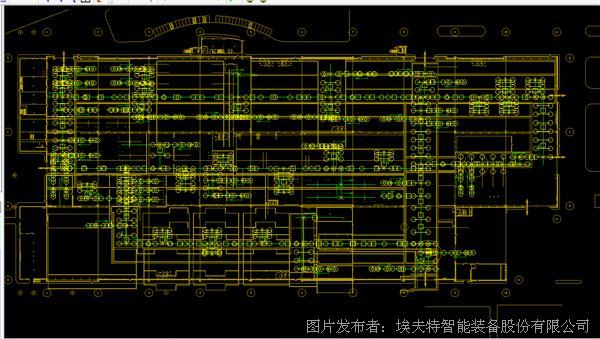
设计地图之前,可导入DXF格式的车间布局文件(现场车间地图和小车),用户参照该文件绘制AGV运行路线,可在该软件中绘制AGV的路线起始点,交叉点,磁钉点,工位点(根据用户的应用进行自定义,例如装载和卸载位置点),限制点(用于限制路径和AGV的方向和姿态),如下图所示,深黄色背景为车间DXF文件,方形点位为限制点,圆形点位为磁钉点,在交叉点可设置转弯类型。
设定AGV的运动状态: 例如:设定AGV小车的运行速度,转弯类型,转弯半径,纠偏距离,顺逆时针等等。
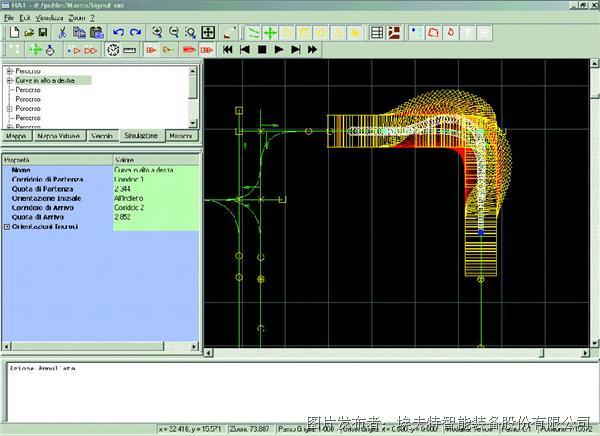
为优化AGV的运行情况,RAT中可初步设计AGV的大小尺寸,用于模拟空间被占用的任务长度或者尺寸,避免现场调试过程中运行中的AGV和现场环境出现干涉情况,见下图。
二. AGV Manager:
AGV Manager是一个在Windows / Linux平台上运行的软件工具,使用Script脚本语言编写逻辑调度过程,可实现多台AGV的正常交通,协作以及通讯等等功能。描述由瑞博思惯性导航系统控制的AGV运行过程,如下图所示。

负责多个AGV的协同运动:
1. 自动处理多个AGV之间的避障、优先级算法。
2. 根据已知地图中现有的路径和AGV方位,自动计算最优路径分配给每个AGV。
3. 提供了一个基础开发环境(X-script)来描述AGV的运动过程。
4. 通过处理AGV管理器本地接口接收的信息,或者通过其他通道交换的信息(socket,…)
5. 可提供集成“插件”,并编写相应的应用程序,以增加AGV管理器的特定功能。
在WMS(仓储管理系统)上安装AGVManager,可以实时在线监控工厂中所有AGV的运行情况和现场装载,卸载等等IO的具体情况。
通过无线调制解调器的串行连接、TCP/IP协议或UDP无线局域网与每台AGV进行通讯。
支持与PLC的通讯:
1. 可与具有RS232串口、 OPC服务器连接的通用PLC通信。
2. 可与具有发送/接收协议或获取/写入协议的以太网接口的PLC通信。
数据库通讯:SQL服务器,Mysql,PostgresSQL,ODBC,用于存储用户所需的各个工位的信息。
三. 应用案例:
1. 意大利 Tenax SPA搬运胶水。
这是一个平行线的垂直仓库,有4台AGV在这个仓库中运行(车辆长8米,宽1.2米,重量10吨)。
该AGV有4个轮子用于转向和牵引,能够在两个方向上进行导航,即横向移动和纵向移动。他们也可以在保持相同方向的线条之间进行切换。 这个功能可以节省很多时间。

1. 飞机零件搬运AGV
该车的目标是携带用于生成波音787碳纤维车身的心轴。
AGV的重量是40吨,而波音787碳纤维车身的心轴的重量是120吨!
同样在这种情况下,由于有8个牵引轮和8个转向装置,AGV能够纵向和纵向移动。
采用固态陀螺仪+磁钉导航方式,最终的定位误差小于1毫米.

1. 零件搬运机器人
浙江某客户AGV,采用磁钉+惯导方式运行,用于物料的采集和放置,共20个AGV在一个工厂车间同时工作。



